robotikauns.net | Basys3 FPGA board adalah salah satu produk pembelajaran FPGA buatan Digilent.
Dengan menggunakan development board FPGA Basys3 ini kita dapat belajar
membuat desain logika untuk tujuan pembuatan integrated circuits (IC)
dengan fungsi khusus atau bahkan IC programmable seperti halnya
mikrokontroler. Gambar 1 dan gambar 2 adalah gambar Basys3 FPGA board.
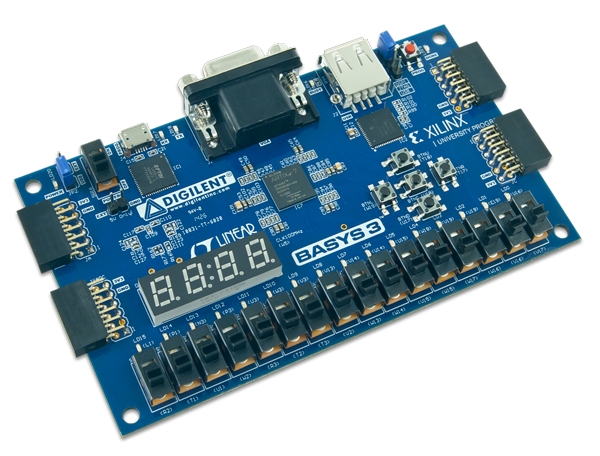
Gambar 1. Basys3 FPGA board (top view)

Gambar 2. Basys3 FPGA board (bottom view)
Gambar 2. Basys3 FPGA board (bottom view)
Basys3 menggunakan FPGA buatan Xilinx tipe Artix-7 (XC7A35T-1CPG236C) yang memiliki fitur sebagai berikut ... Selengkapnya >>

Bays3 FPGA board
robotikauns.net | Basys3 FPGA board adalah salah satu produk pembelajaran FPGA buatan Digilent . Dengan menggunakan development board FPG...