robotikauns.net |
Interupsi adalah proses dalam sistem mikrokontroler yang menghentikan
aliran program utama akibat terjadinya (event) trigger (pemicu) tertentu
dari suatu sumber (vector) interupsi dan memaksa sistem mikrokontroler
untuk mengeksekusi sub-rutin/fungsi/blok program layanan interupsi
(interrupt service routine, ISR) hingga selesai (complete). Setelah
program interupsi selesai dikerjakan, maka sistem mikrokontroler akan
kembali melanjutkan program utama yang sebelumnya dihentikan. Gambar 1
menunjukkan ilustrasi sebuah proses interupsi program.

Gambar 1. Proses interupsi program
A. Sumber (Vektor) Interupsi
Pada sebuah komponen embedded systems seperti mikrokontroler, memiliki 2 jenis sumber interupsi, yaitu:
- Interupsi internal
Sumber (vektor) interupsi yang berasal dari dalam sistem mikrokontroler itu sendiri. - Interupsi eksternal
Sumber interupsi yang berasal dari luar sistem mikrokontroler.

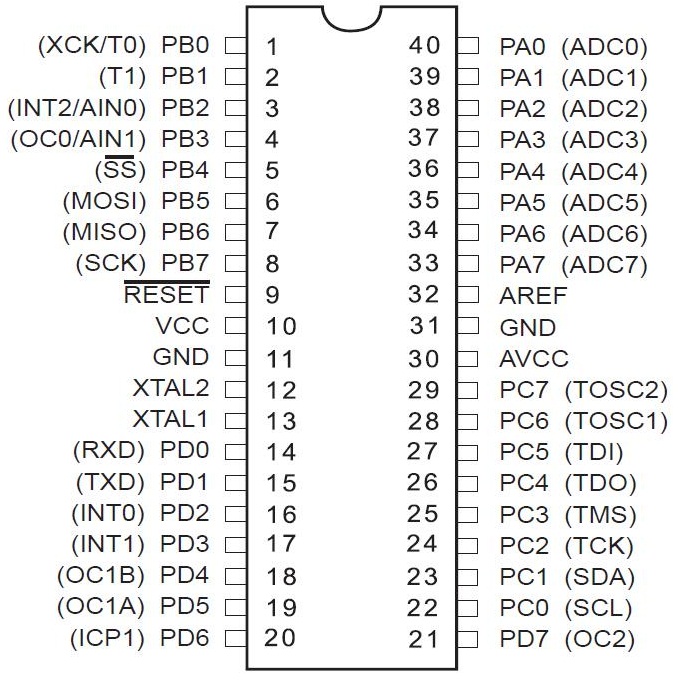
Interupsi Pada Mikrokontroler AVR ATMEGA32
robotikauns.net | Interupsi adalah proses dalam sistem mikrokontroler yang menghentikan aliran program utama akibat terjadinya (event) t...